![]()
FXGPSPIO
X.Fenard
(Boitier RX2010 selectronic)
Derniere remise a jour: 2005/03/20
ATENTION l'AUTEUR NE SERAIT PAS RESPONSABLE DU SYSFONCTIONNEMENT DU MONTAGE et des CONSEQUENCES DE CE DYSFONCTIONNEMENT.
Ce montage n'est pas rťvolutionnaire, avec l'aide d'un GPS et d'un fichier donnant les positions
"d'intťrÍts" (POI = point of intťrÍt) il signale que l'objet "intťressant" est proche.
Cette rťalisation est freeware, elle a ťtť conÁus pour Ítre d'un coŻt minimum et ouvert.
Le rťcepteur GPS est incontournable, son prix, en version OEM environ 100 euros, avec 20 euros pour le
montage, on arrive a moins de 150 euros.
Caractťristiques principales:
- Completement autonome (sans PC,..)
- Informations lumineuses et sonores
- Trois niveaux d'alerte
- Faible encombrement
- Module "clef "
- 127 PIOs dans une EEPROM 24C08
- Alimentation du rťcepteur GPS
- Possibilitť de "marquer" un point (a venir)
- Dialogue avec le PC dans les deux sens (remise a jour POI et lecture point marquť)
- Dialogue RS485 et reception GPS en simultannťe (Rťcuperation info par la RS485)
- Mode transparent(2): NMEA->RS485 toutes vitesses, ou NMEA (4800)-> RS485 (9600)
- Envoi de fichier de trames NMEA par le PC vers le boitier (test)
- Logiciel PC simple, fonctionnant sur tous les PC en BASIC
- Interface I2C commandable a distance par le reseau RS485 (24Cxx ou tout composant I2C)
- Codage compacte, extension possible (2/3 V20050317)
- Alimentation protťgťe contre inversion de polaritť
Ce montage est compatible avec les modules du rťseau 485 dťcrit sur le site.
La version de la platine FXGPSPOI RS232 permet de relier directement le module au PC sans qu'il soit
nťcessaire d'avoir une interface RS232/RS485.
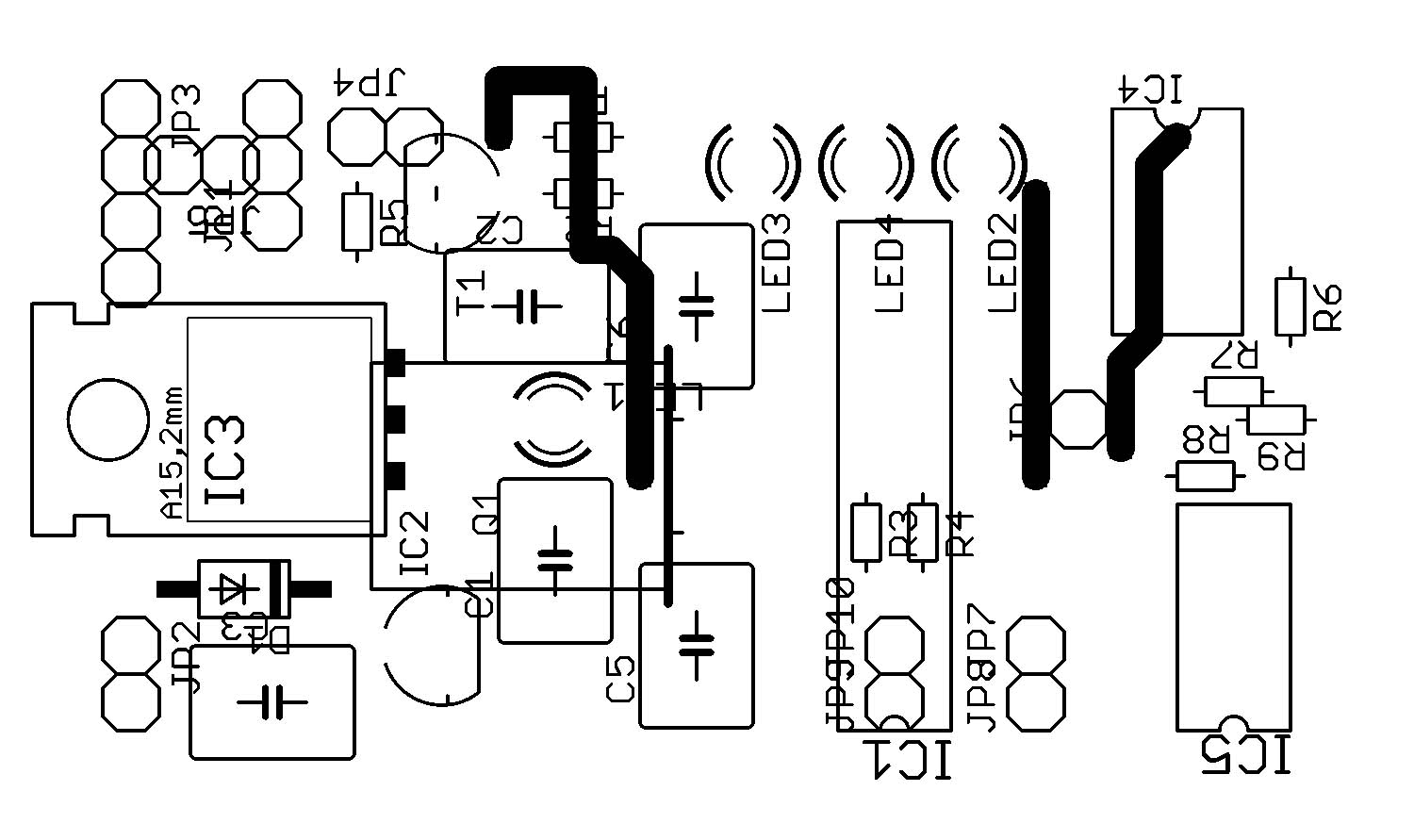
Cliquez pour voir le plan (version RS485 V00)

La description.
Le MontageLe schťma est simple, le PIC 16F628 gŤre trois leds: une verte, une jaune, une rouge pour indiquer la
distance au radars. Sa liaison sťrie est utilisťe pour le dialogue RS485 (avec le PC lors des mise a jour) un UART logiciel sur le port B0 recupere les informations du rťcepteur GPS a 4800 bits/s.
Entrťe logique, polarite inverse (type RS232: Vnegatif--masse->1, Positif V>3V ->0)
Le rťcepteur GPS doit avoir une sortie NMEA, l'information de positionnement est transmise au module,
le PIC 16F628 la compare avec la liste des points contenu dans une 24C08 ou 24C16.
Alimentation
Le module est protťgť contre les inversions de polarites, par une diode. Le rťgulateur 78L05 assure
l'alimentation du montage. Le second rťgulateur est destinť a l'alimentation du rťcepteur GPS. La encore
toutes les solutions sont possible en fonction de la tension nťcessaire a l'alimentation du rťcepteur.
Avec un 7805 et une LED verte on a 7 volts. Pour 9 volts, il suffit de le remplacer par un rťgulateur 7809
et de mettre un strap a la place de la LED. Il est possible d'ajouter dans le boitier une self de filtrage
si nťcessaire, pour ťviter de parasiter le rťcepteur GPS.
Version proto utilisez le fichier dans le zip

Schťma de cablage du connecteur 15 points
Le montage n'utilise qu'un seul connecteur, on y connecte soit le rťcepteur GPS soit le c‚ble vers le PC.
La patte 5 du connecteur 15 points a la masse informe le PIC de sa configuration
Pour faire la liaison en RS485 il suffit de sertir un c‚ble plat 9 points sur le c‚ble 15 points
Cote boÓtier, le connecteur est MALE, ainsi cote voiture, ou le 12 volts est prťsent, le connecteur est Femelle.
|
15 points |
9 points RS485 |
Signaux |
9 points PC |
|
1 |
|
LEDR |
|
|
9 |
|
LEDJ |
|
|
2 |
|
LEDV |
|
|
10 |
|
+LED |
|
|
3 |
|
+HP |
|
|
11 |
|
-HP |
|
|
4 |
1 |
|
|
|
12 |
6 |
GPS NMEA |
|
|
5 |
2 GND |
GND |
5 GND |
|
13 |
7 |
+GPS |
|
|
6 |
3 |
|
|
|
14 |
8 GND |
GND |
5 GND |
|
7 |
4 +12V |
+12V |
|
|
15 |
9 RS485 |
RS485/RS232 |
3 TX |
|
8 |
5 RS485 |
RS485/RS232 |
2 RX |
Fonctionnement dans la voiture
A la mise sous tension les trois LEDS ainsi que le Haut Parleur fonctionne, ce qui permet de vťrifier le fonctionnement du module.
En fonctionnement la LED VERTE Clignote ou la LED ROUGE Flash. Le flash indique un fonctionnement du module SANS rťception correcte du GPS. Le clignotement, une rťception correcte GPS.
Si rien n'est a signaler, la LED VERTE est allumťe, a l'approche c'est la JAUNE, trŤs proche on passe en ROUGE.
Enfin lorsque on est sur le point, un signal sonore (HP) se fait entendre.
Le programme de Mise a jour
Il a ťtť ťcris en QBASIC. L'interprťteur fonctionne sur tous les PC, les vieux les modernes. Il suffit de dťmarrer avec une disquette DOS et le QBASIC dessus lancer le programme "rad485FX.BAS".
Il fonctionne aussi sous W98 dans une fenÍtre DOS (pas testť pour les autres).
La version d'integration est: Ver2005/03/05 (voir en bas de l'ťcran).

Exemple d'affichage: visualisation du contenu de l'EEPROM
Lecture des informations GPS par la RS485
Pour voir ces informations il suffit de faire un vidage de la RAM, a partir de l'adresse 0x70 : Heure,Minute,Seconde et V/A: trame valide ou non.
Les applications peuvent recuperer ces informations en utilisant les commandes reseaux de lecture memoires.
Adresse du module
Par defaut, il est a l'adresse 1, le programme BASIC utilise cette adresse (modifiable voir dans le menu systeme).
Il est possible et obligatoire de lui assigner son adresse (unique) dans le reseau RS485.
Utilisation
Il faut toujours commencer par initialiser la liaison:
Sťlectionner COM1 ou COM2
Pour vťrifier le dialogue faire ensuite un Test Ping il doit rťpondre par: Ping OK.
SANS CETTE REPONSE ne pas aller plus loin.
Ca ne fonctionnera pas mieux et en plus les temporisations ralentiront le retour des messages d'erreurs.
Visualisation de la mťmoire du PIC
Un Dump mťmoire permet de voir le contenu de la mťmoire du PIC16F628.
Le reste des fonctions n'est pas utilisť pour cette application.
Sťlection EEPROM
Pour:
Effacer l'EEPROM (30 secondes)
Voir son contenu par page de 256 octets
Charger les PIOs.
Nomenclature
|
C1 |
10uF /25V |
|
C2 |
100nF |
|
C3 |
100nF |
|
C5 |
22pF |
|
C6 |
22pF |
|
D1 |
1N4004 |
|
IC1 |
PIC16F628/20 |
|
IC2 |
78L05 |
|
IC3 |
78XX(suivant GPS) |
|
IC4 |
MAX481CPA /LTC485 |
|
IC5 |
24C08 |
|
LED1 |
LED3MM (cf text GPS) |
|
LED2 |
LED3MM |
|
LED3 |
LED3MM |
|
LED4 |
LED3MM |
|
Q1 |
XTAL 8Mhz /20MHZ V20050317 |
|
R1 |
1K |
|
R2 |
10K |
|
R3 |
10K |
|
R4 |
10K |
|
R5 |
220 |
|
R6 |
22K |
|
R7 |
22K |
|
R8 |
4K7 |
|
R9 |
4K7 |
|
T1 |
BC547 |
|
Con |
DB15 femelle |
|
Boitier |
RX2010 Selectronic |
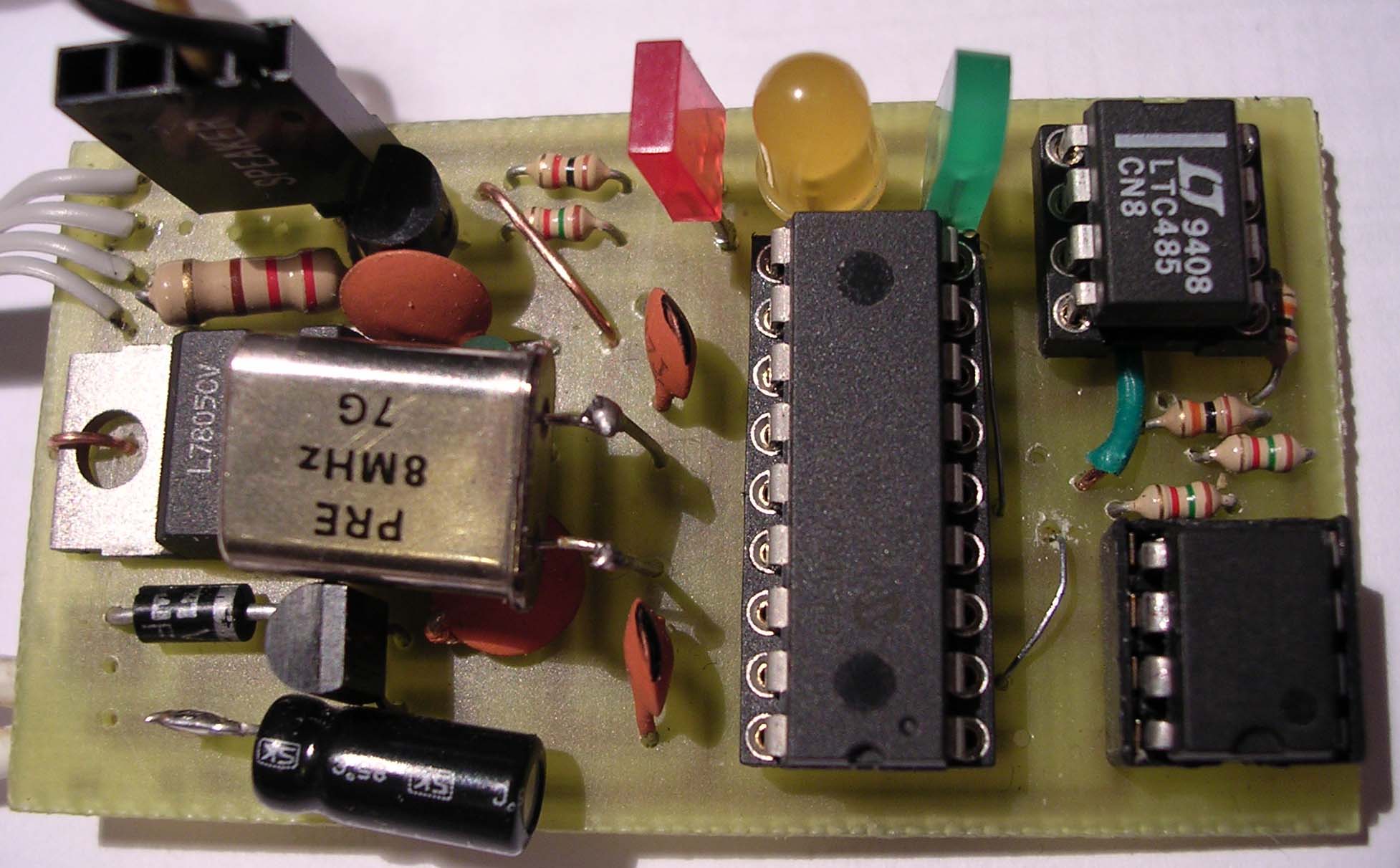
Prototype
La version prťsentťe est la version prototype V00, la version V01 est la version a jour ( dans les fichiers)
V01:
- plus de resistance sous le boitier du PIC
- gestion de l'EEPROM: Bug sur RA5 (correction) et gestion de WR de l'EEPROM.
Informations diverses:
Le boÓtier est "vu" comme une clef. En utilisation normale il n'a pas a Ítre ouvert.
Facile a mettre en place et a extraire pour la mise a jour des PIOs ou bien la lecture des "enregistrements".
Les leds sur la platine (boÓtiers fermťs) ne sont pas nťcessaires, mais cela n'est pas gÍnant pour installer des leds externes qu'elles soient prťsentes.
Une version du programme lťgŤrement diffťrente utilisera une bi led tricolore a la place des trois leds, plus facile a intťgrer dans le tableau de bord.
Adaptateur RS232:
Voici le montage en remplacement du circuit LTC485 pour le faire fonctionner en RS232.
Il suffit de le connecter sur la COM1 du PC.

Gestion des POIs
Evidement le plus simple consiste a utiliser les programmes tous fait.
Les cartes ainsi que ces programmes ne sont pas donnťes
On peut aussi charger tous les POI, mais il y en a quelques centaines
Il faut une Eeprom de 64,128K bits.
On fait travailler le PIC pour rien ca ralentit la recherche
et sa sert a rien puisqu'on y va jamais sur ces POI!.
Voici une solution simple permettant la maÓtrise de son fichier de POI.
On peut facilement trouver sur le WEB:
-La position de toutes les villes de France,
-Des fichiers de positions au format ASC ou OV2 (de la sociťtť TOMTOM)
-Des programmes de conversions ASC OV2.
Avec des fonctions du programme BASIC et un ťditeur de texte on peut effectuer
les manipulations necessaires.
Pour rťduire le nombre de POI, il suffit de faire un filtrage sur une ZONE gťographique.
On choisit quatre villes, par exemple BEAUVAIS pour la latitude NORD,
BRIVE pour le SUD, REIMS pour la longitude EST et NANTES pour l'OUEST.
Une fois la "boite" dťfinit, on place ces valeur dans le programme BASIC (voir dans le programme)
Il suffit ensuite de choisir dans le menu ASC pour, partant d'un fichier de POI , obtenir UNIQUEMENT les POI
qui se trouvent dans la zone. Avec cette mťthode le nombre de POI est passť de 250 a 50.
Les fichier ASC sont du texte, editable. Il suffit de faire des "copier coller" pour joindre plusieurs zones.
Dossier de fabrication: HEX, cuivre version 20050317...
Le fichier ZIP: RS485 schema, PCB,implant V01Dans cette version RS232 le LTC485 a ťtť remplace par deux transistors
branchement directe sur le PC non teste.
Le fichier ZIP: RS232 schema, PCB,implant V01Programme de test (HEX_PIC+BASIC): test LED,HP,EEPROM,DIALOGUE PC,chargement des POIs
Le fichier ZIP: HEXPIC 16F628 et QBASICProgramme version 20050320:
Le fichier ZIP: HEXPIC 16F628 et QBASICA suivre...
