![]()
Quand Nikon fait Robot… X.Fenard
Quand Nikon fait Robot… !

Cliquer pour agrandir
La photographie argentique a vécu, les sites d'encheres proposent des lots d'appareils compacts, dans cette exemple des AW35, dix pour une vingtaines d'euros. Que peut t on y découvrir ? Pour faire un robot...
Le démontage
Il faut dévisser, dévisser les vis, et ne pas en oublier, l'appareil est extrait du boîtier.

Vu de dessus

Pour fonctionner il faut simuler la présence d'une pellicule, d'ou la présence du fil souple gris.
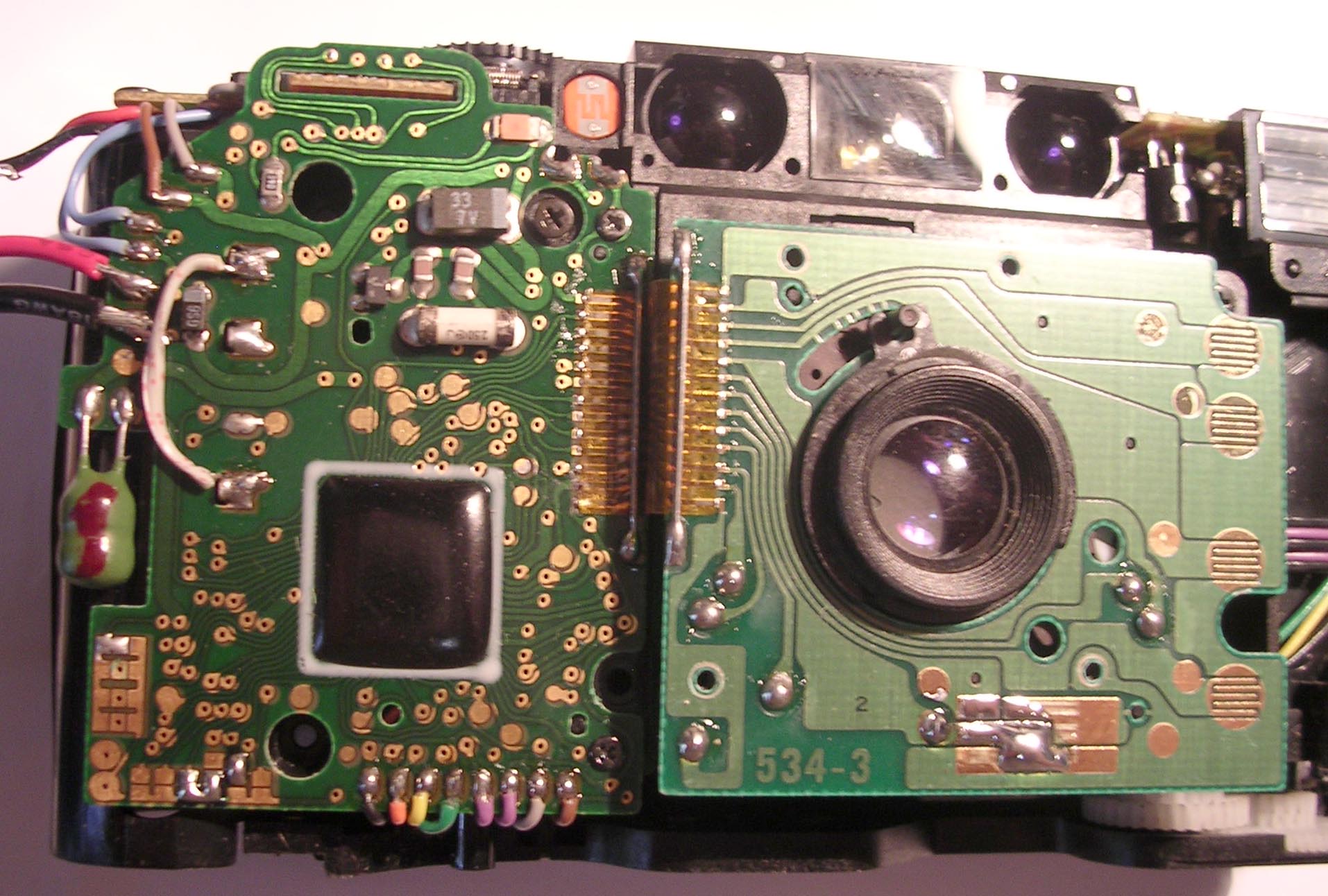
L'électronique peut ętre totalement extrait du boîtier, et elle peut fonctionner ATTENTION exception faite de la mécanique de la mise au point /déclenchement. On la remonte pas ! !.

A suivre…
Le flash
Le Télémčtre
Mesure de lumičre
La mise au point
Le dos dateur
Le détecteur de rotation
Le moteur
La mécanique
-------------------------------------
Le flash
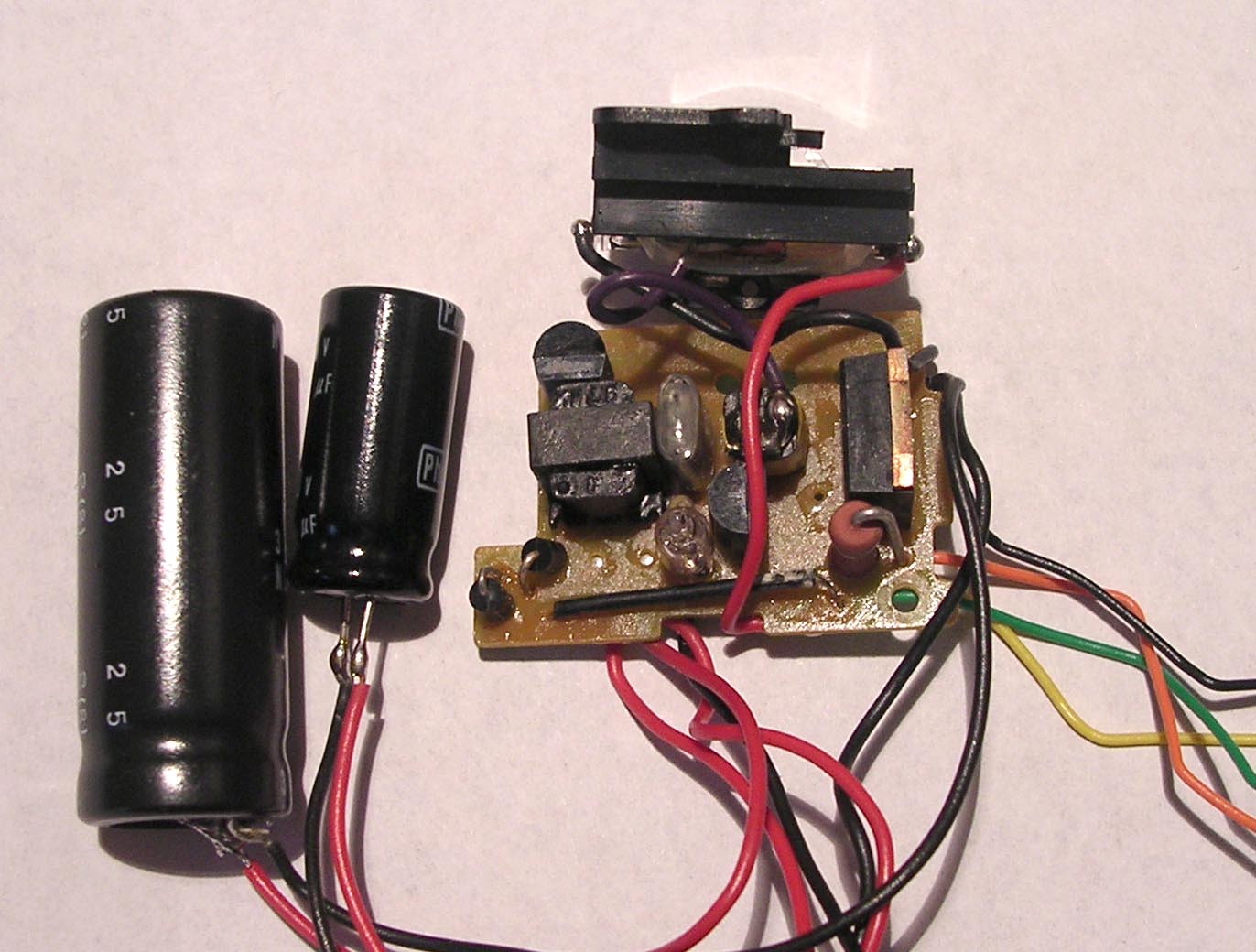
Le flash est directement relié aux piles, il fonctionne sous 3 volts (fil noir et rouge).
Quatre autres fils assurent l'interface avec le cśur de l'appareil : noir, vert, jaune et orange.
Le noir mis a la masse met en route le convertisseur Haute Tension (HT) qui chargent les capacités chimiques.
ATTENTION IL Y A UN RISQUE D'ELECTROCUTION.
IL faut DECHARGER les condensateurs AVANT toutes manipulations.
LA HAUTE TENSION est présente sur TOUTE la partie FLASH.
Le courant quand le convertisseur se met en route atteint 700mA, et termine a 80mA en fin de charge.
Le fil vert est relié a une borne du néon, mis a la masse le néon s'allume pour indiquer la charge des capacités,
le flash est pręt. L'AW35, avec le fil vert, détecte le courant indiquant le flash pręt, coupe le convertisseur.
En mode " yeux rouge " le flash peut produire des petits flash, pour cela il faut mettre 3 volts sur le fil jaune sinon il produira le flash de prise de vue.
Le fil orange mit un court instant a 3Volts produit le flash (ou le pre flash suivant le signal sur le fil jaune).
Le télémčtre

Apres analyse, il fonctionne sur le męme principe que le Sharp GP2D02, il n'est pas impossible que ce soit le męme.
Il mesure la distance au sujet sur une plage de 15 a 80cm environ, le transfert de la distance s'effectue de maničre numérique, le protocole est celui du Sharp.
A 30 euros le capteur chez Conrad, contre 10 ŕ 20 euros dans ce lot, voilŕ une belle économie de 300 euros ! !.
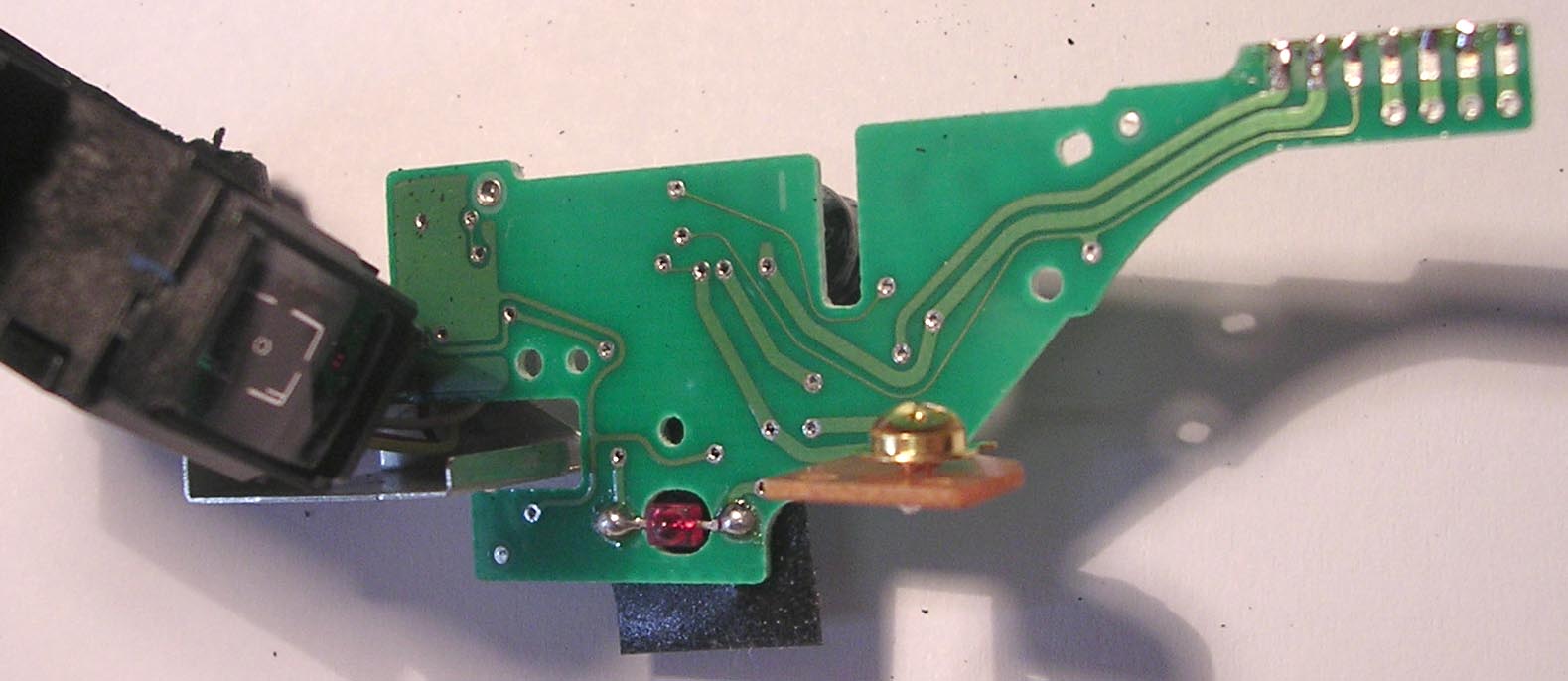
La LED IR émettrice
Le capteur de reception

La bande verte indique le 1. Le fil 1 reçoit le 5 volts (produit dans le AW35 par la bobine verte). Le 5 volts alimente
la LED ROUGE dans le viseur et la LED IR du télémčtre.
La masse du 5 volts est sur le fils 2. Le fils 3 fournit les donnée digital, le 4 mis a la masse allume la LED rouge du
viseur. L'alimentation 3 volts du capteur du télémčtre est sur le fil 5, sa masse sur le fil 6.
Enfin le dernier, le 7 envoi l'horloge destiné a la lecture des données.
Voir la doc du Sharp GP2D02 pour plus d'informations.
La lumiere
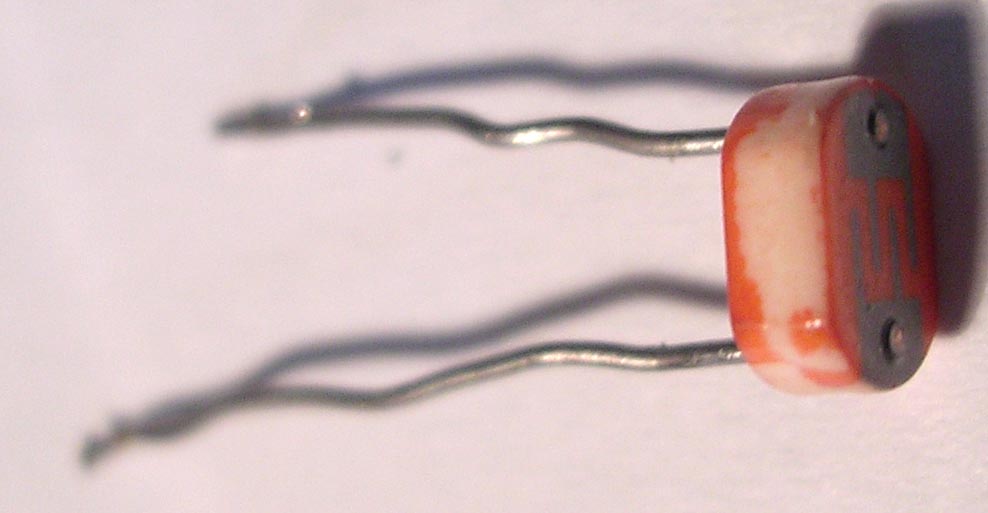
La mesure de lumičre s'effectue par une cellule LDR.
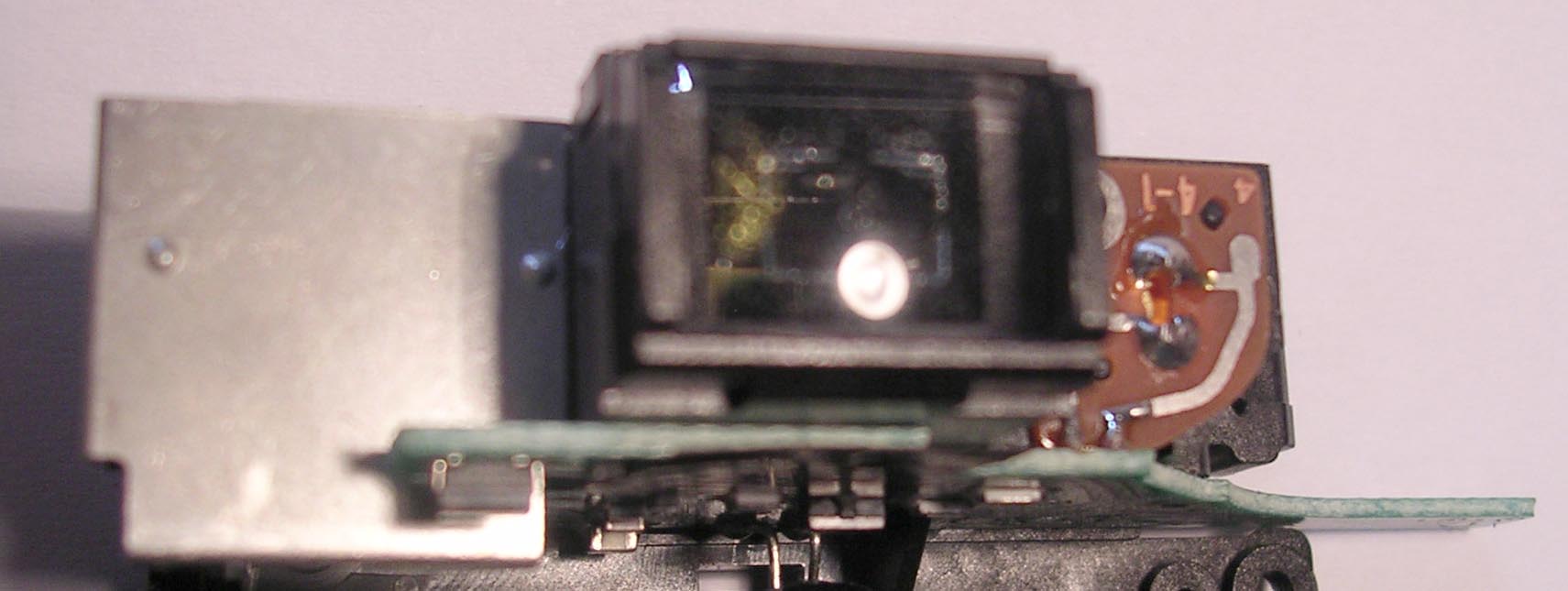
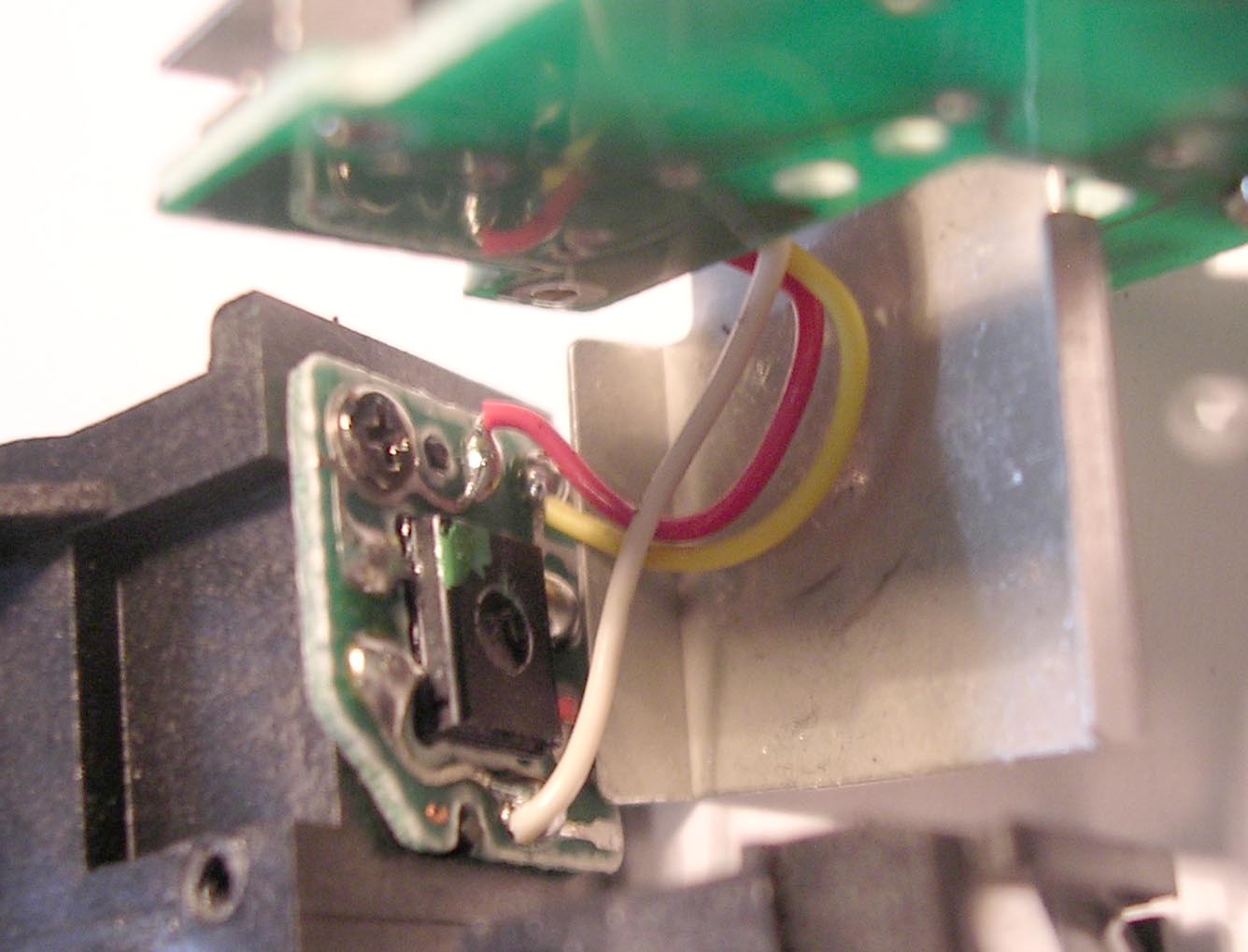
La mise au point
La carte mise au point est reliee a la carte mčre par un câble souple multi conducteurs, une grande partie sert a l'interface avec les boutons.
Pour faire la mise au point il faut avancer ou reculer l'objectif.

Un petit moteur pas a pas assure a la fois le mouvement de l'objectif, l'armement du déclencheur et le déclenchement.
Deux bobines font tourner le moteur, un interrupteur détecte la fin de course ou ( ?) l'armement.L'ensemble utilise uniquement six fils.

Cette carte peut servir de servo, d'autant qu'un systčme mécanique astucieux " mémorise " la position męme courant coupé.
Ce servo peut s'utiliser en robotique pour la direction.
Le dos dateur

Il permet d'inscrire la date sur le film. Un mini afficheur l'imprime, il est mis en fonction lors du déclenchement.
La tension négative de la pile est sur le fil noir, positive sur l'orange (3V) enfin le marron pour mettre en fonction le mini afficheur.

(1heure 38 minutes de fonctionnement)
Ce dos peut servir a mesurer le temps, des la mise sous tension il commence a partir du 1er janvier 1987 a 0h 0m.
Trois boutons permettent le réglage, le MODE (a gauche) sélectionne le mode d'impression sur le film et l'affichage ( date ou heure suivant plusieurs formes).
Le second SET sélectionne le paramčtre a mettre a jour, enfin le dernier permet le changement de la valeur.
Le détecteur de rotation
Ce capteur de rotation permet de vérifier l'avancement du film, de le faire avancer avec une bonne precision, le comptage est mécanique.

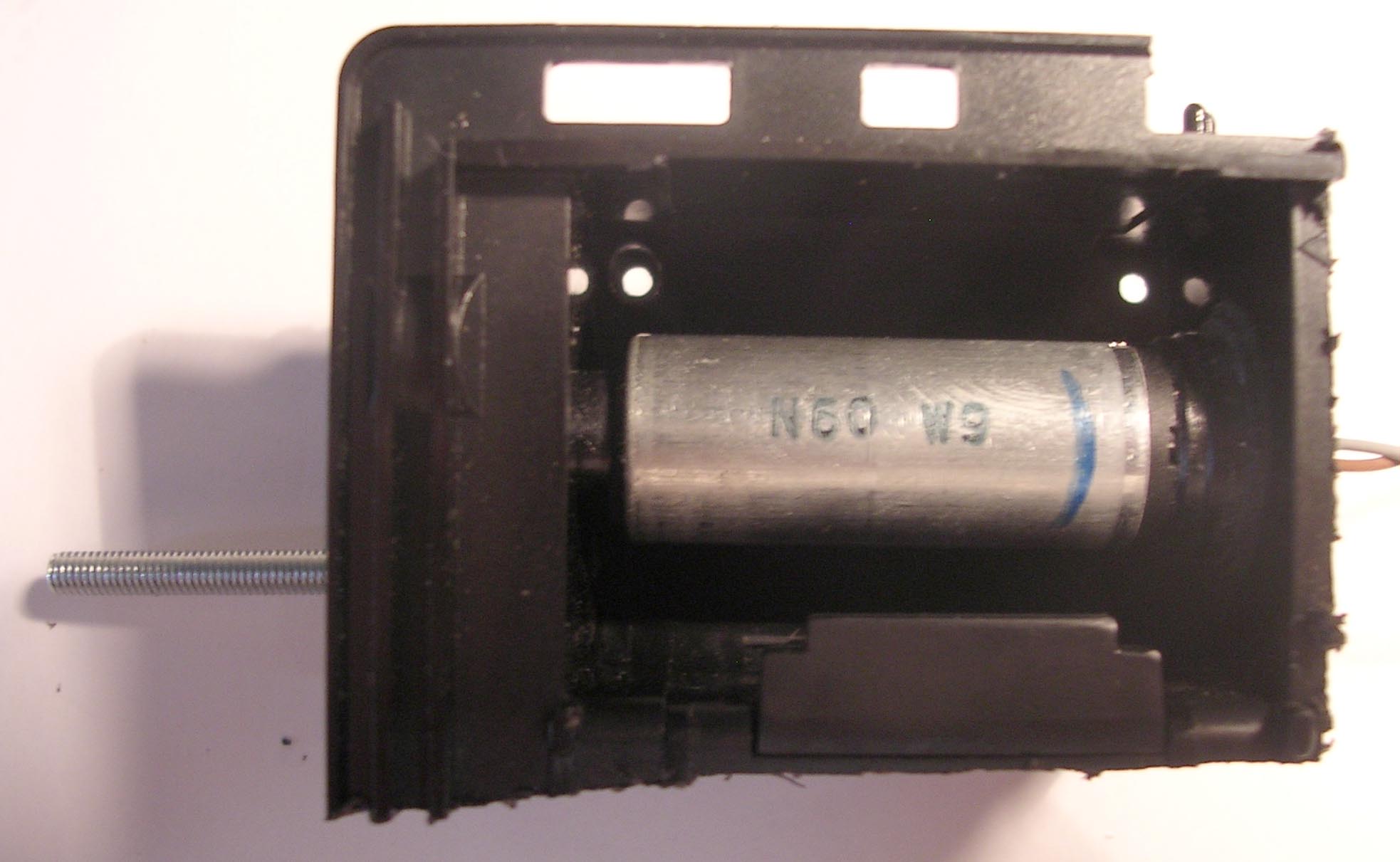
Le moteur

C'est un petit moteur puissant, dans l'appareil il est place a l'intérieure de la bobine réceptrice du film.
Il est alimentée sous 3 volts, avec la mécanique, a vide sa consommation est de 100mA, en charge elle passe a 200mA, a 300mA il est capable de " sauter les engrenages ", c'est son couple maximum, un peut moins d'un W.
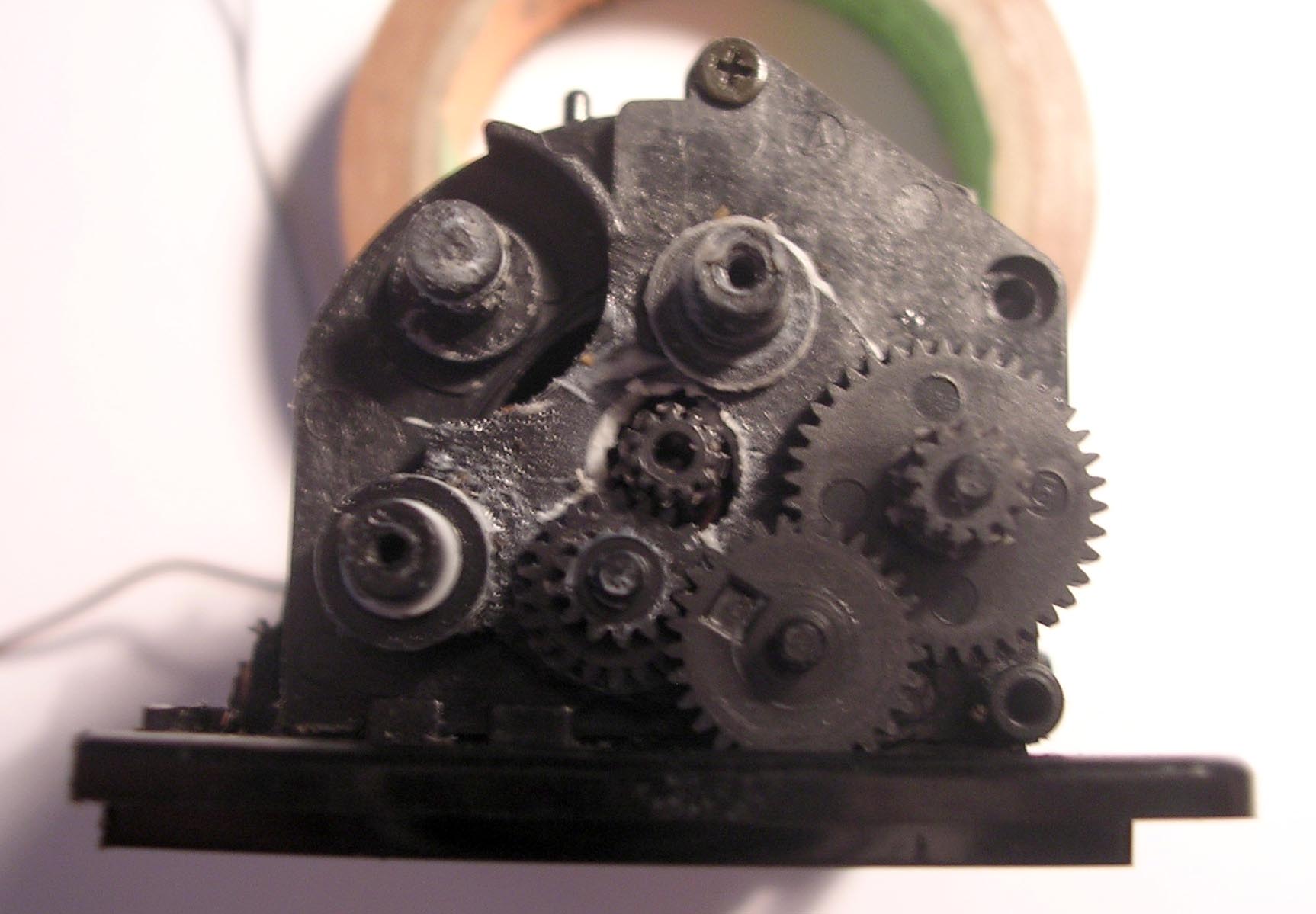
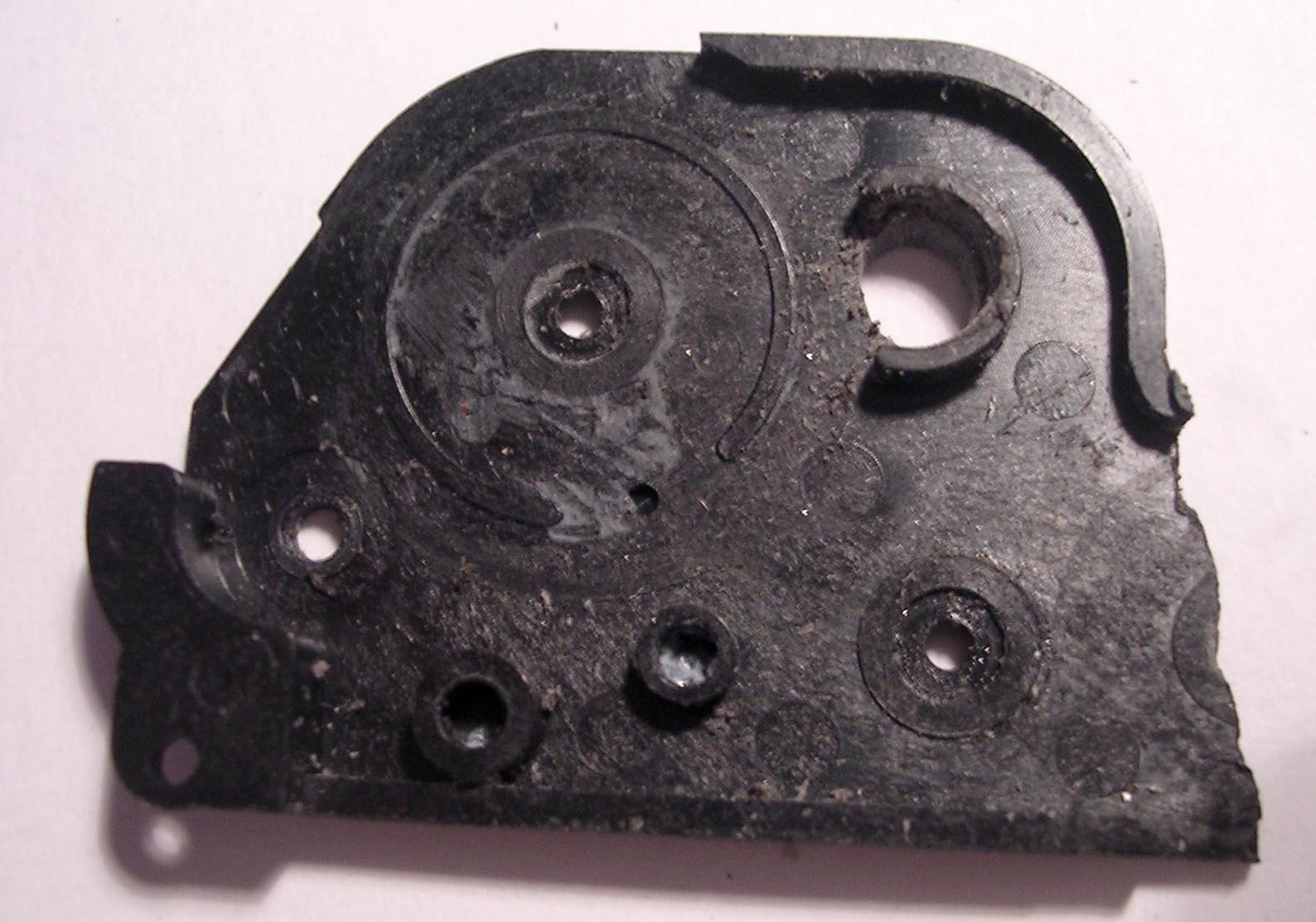
La mecanique
Avec le moteur, les engrenages réducteurs permettent d'obtenir une vitesse permettant de faire avancer un robot.

Le dessous contient les engrenages et l'embrayage de re bobinage de la pellicule.

La premičre opération consiste a scier le boîtier afin d'isoler la partie châssis moteur.

Détails des engrenages
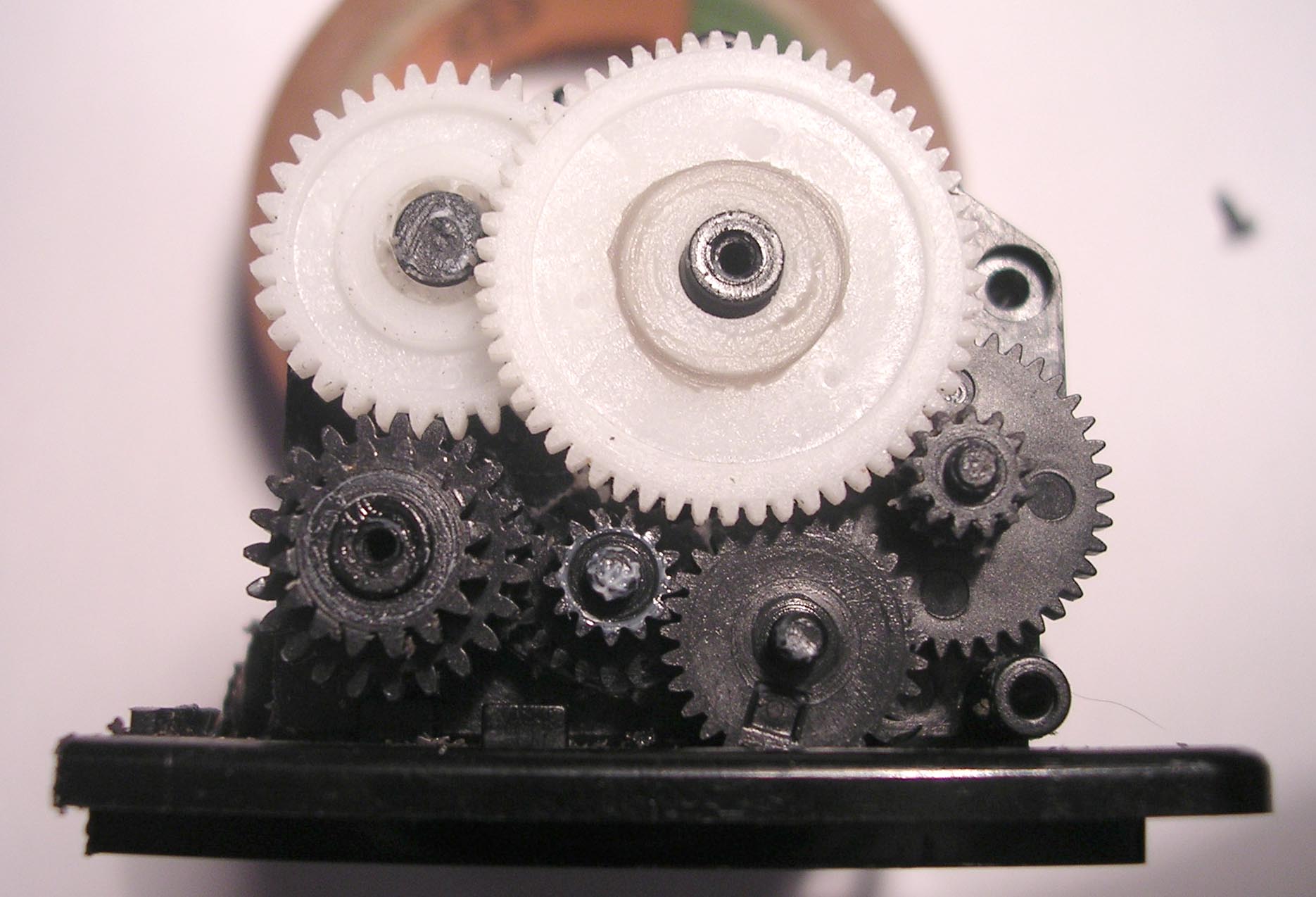

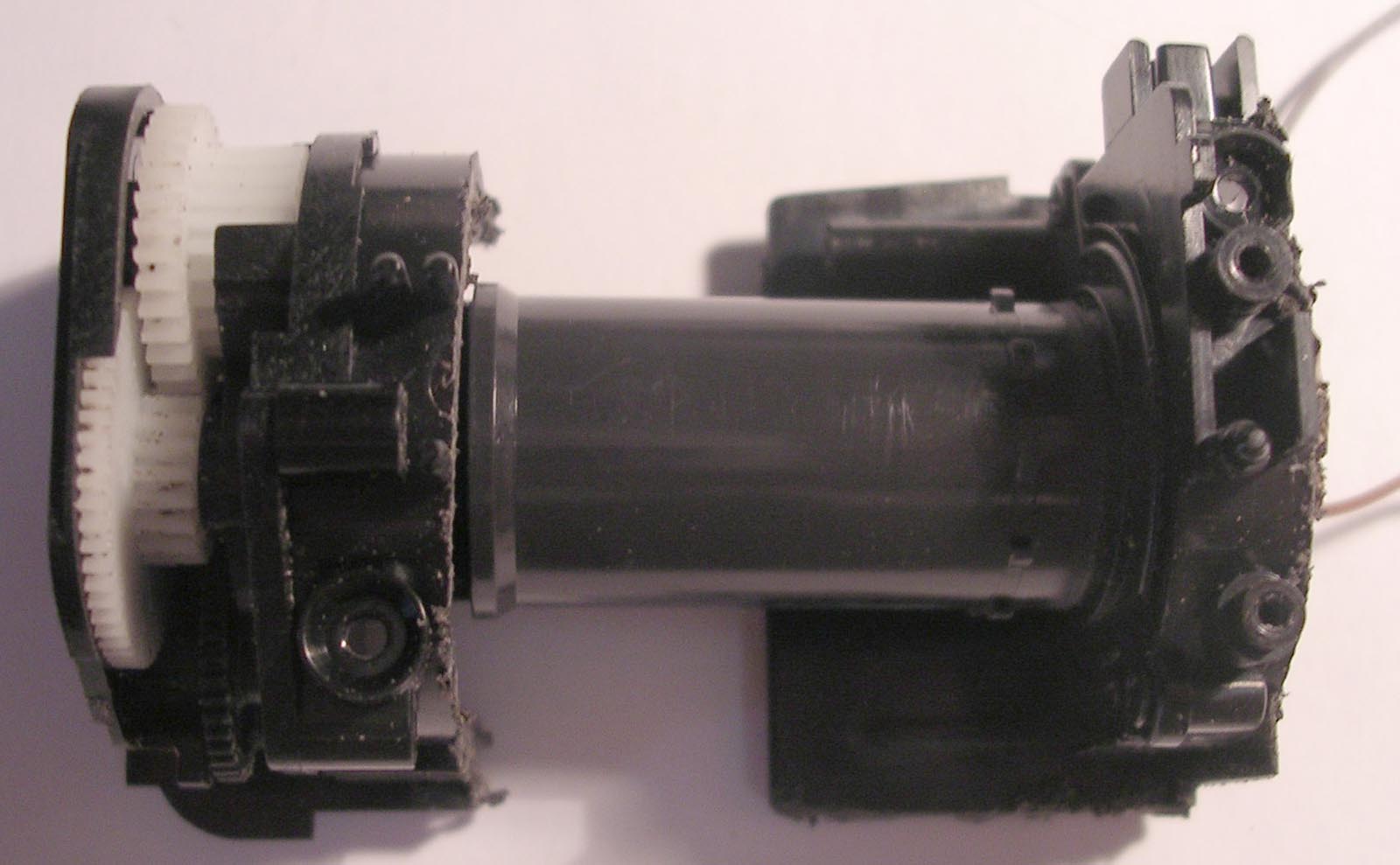
Il faut ensuite trouver une solution pour récupérer la rotation du moteur aprčs les engrenages.
Deux solutions ont été trouvées, il en existe peut ętre d'autres.
La solution sortie d'axe.

L'engrenage choisie est celui qui entraîne le cylindre, un centrage externe assure son maintien, Le centrage d'axe reçoit la vis.

La vis est lime en épaisseur et un méplat est fait afin de la bloquer dans l'engrenage.

La solution roue robot.
Dans cette solution on utilise le cylindre comme axe de roue.
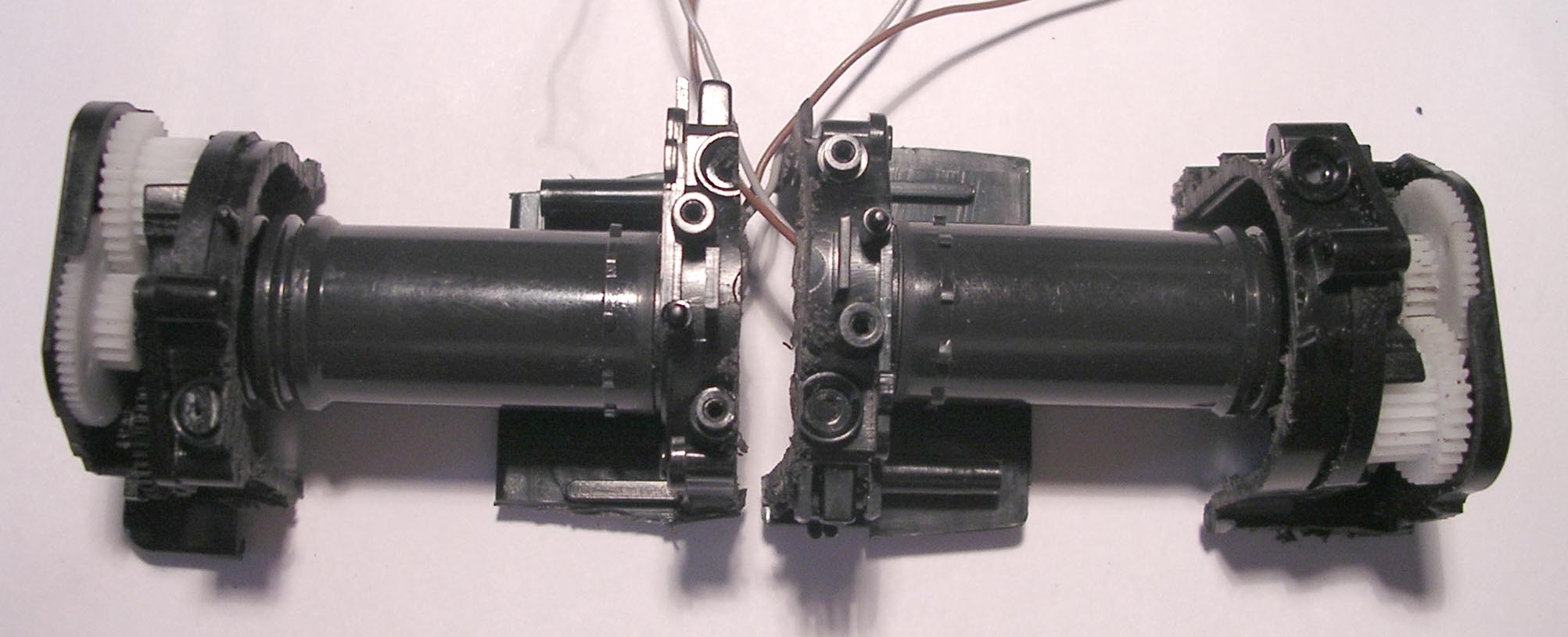
L'engrenage du capteur de rotation peut servir pour mesurer la rotation de la roue, donc la distance.
Prix de l'ensemble....
Flash électronique 6*10 60 euros
Télémčtre 10*30 euros 300 euros
Cellule photo 10 * 3 euros 30 euros
Moteur 10* 3 euros 30 euros
Réducteur 10*10euros 100 euros
Total 20 euros
Voilŕ pour quelques euros tout un ensemble de pičces pour réaliser des robots…
reste le cśur, il lui faut un cerveau !….. Pas de problčme : il lit ce texte…